無人機(ロボット・ドローンなど)の遍在化による様々なリスクとは?
予想される未来社会の変化
- 無人機(ロボット・ドローンなど)が遍在化することで、利便性と同時に新たなリスクが生じている。
- セキュリティリスクが浮き彫りになる。ドローンによる盗撮・密輸・テロ行為や、ロボットを利用した自動化された窃盗・侵入などの犯罪が増加する。無人機がハッキングされ、乗っ取り・遠隔操作される。常時監視社会が進行し、無意識化の撮影・データ収集の恐れもある。
- ドローンの落下や追突など安全面でのリスクも生じる。バッテリー廃棄問題や騒音・景観の悪化など環境負荷リスクも問題となる。
トレンド
地図API「ZENRIN Maps API」

ゼンリンは、ドローンが安全に飛行するための飛行経路設計をサポートする「ドローンルート検索機能」「ドローンルート評価機能」の提供を、ゼンリンが保有する各種地図情報を自社サービスと連携できる地図API「ZENRIN Maps API」にて開始。
ドローンの飛行の実現に不可欠な “空の道”である飛行経路の構築には「経路計画に掛かる作業工数の多さ」、「設計者のスキルに左右されるルートの正確性」など、コスト面・安全面での課題が多く残っている。
「ドローンルート検索機能」は、ゼンリンの地図データベース上で飛行経路の出発地点と到着地点を入力することで、経路周辺の地物(道路・建物・水路等)情報と、ドローンが落下した際の分散範囲を計算し、リスクの最も低い安全な飛行ルートを自動生成。「ドローンルート評価機能」は、当APIを使用せずに作成した飛行ルートでも、座標を入力することで安全性を検証することができる機能。本機能の提供を通じ、専門スキルが求められる経路設計業務の属人化解消に貢献する。
南紀白浜空港における映像解析技術を用いた、障害物検知業務の効率化・高度化を図る実証実験
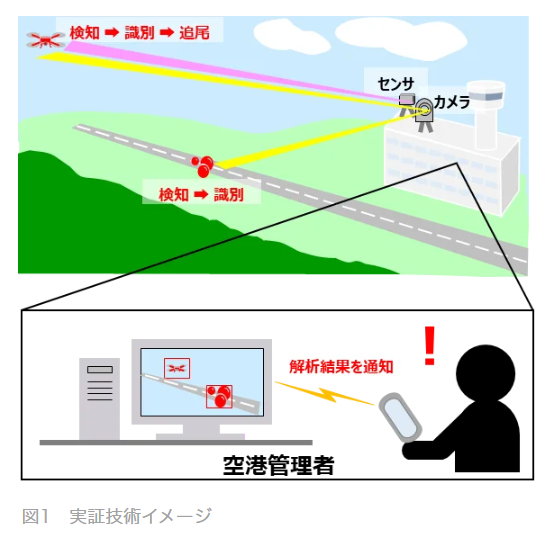
南紀白浜エアポート、日本電気(NEC)、および日立製作所は、南紀白浜空港の滑走路および周辺空域において、映像解析技術を用いて落下物やドローンなどの検知を行う実証実験を開始。
南紀白浜空港では、空港の運用管理業務の一つとして、滑走路および周辺空域に対して障害物(滑走路の落下物や、外部から飛来するドローンなど)の有無を把握し、障害物を発見した場合は細かいものを含めて撤去を行っている。こうした障害物監視業務は、航空機の安全な離着陸のために重要となる。
しかし、全長2,000m×幅45mの滑走路上で小石サイズの障害物を発見することは難しく、空港職員による車両走行点検を1日に2回行い、目視で安全を確保している。ドローンの監視も同様に、広大な空域を監視する手段が目視に限られているため、デジタル技術を活用した障害物監視業務の高度化・効率化が求められている。
本実験では、富士フイルムのレンズ一体型遠望カメラ「SXシリーズ」(遠望カメラ)で滑走路および周辺空域を撮影し、その映像データをNECと日立が解析して落下物やドローンなどを検知。障害物を効率的に発見し、空港保安業務の省力化および高度化を図る。
具体的には、南紀白浜空港内に遠望カメラを設置し、滑走路および周辺空域を撮影。撮影した映像データから各社が解析した結果をもとに、遠望カメラの効果的な設置場所の選定や、検知対象である滑走路上の落下物・周辺空域のドローンの検知可否の検証および監視業務の実運用に係る課題の洗い出しを行う。将来的には撮影映像の活用方法をさらに拡大し、さまざまな付加価値を創出することで、効果的・効率的な空港の安全確保を目指す。
地上ロボットを用いた攻撃

ウクライナ軍の部隊は、地上ロボットを用いた攻撃を前線で100回以上実施。地上ロボットを用いた最初の作戦は2025年夏に実施された。
これらの作戦には、敵兵の排除、掩蔽壕(えんぺいごう)、指揮所、その他の敵インフラ施設の破壊が含まれており、単発的な出来事ではなく、組織的な戦闘作戦になっているという。
ウクライナ軍の隊員は、「本格的なロボット突撃作戦に向けて、われわれは既に5~6基の地上カミカゼロボットシステム(自爆型ロボット)と、戦闘モジュールを搭載した地上ロボットシステム(攻撃型ロボット)を同時に配備している」「この手法は突撃歩兵部隊を効果的に代替し、人員へのリスクを最小限に抑える」と説明。
歩兵が関与することなく、ロシア軍は降伏し、捕虜が捕らえられた世界初のロボットによる敵陣地攻撃となった。