ロボット・モビリティ間の連携・協調とは?
- 今後は配送ロボット・清掃ロボット・警備ロボット・ドローンなど単体として機能していたロボット同士の連携が進み、共通プラットフォームで接続され、役割分担・協調動作を行うようになることが予想される。
- ロボットがインフラとして常在し、物流・警備・清掃・移動がシームレスに統合されると予想される。
- 複数のロボットが都市OS上で連携するようになると、最終的には都市や建物そのものが「ロボット化」する。
トレンド
ロボットを活用した省力化稲作「WORKROID農業」
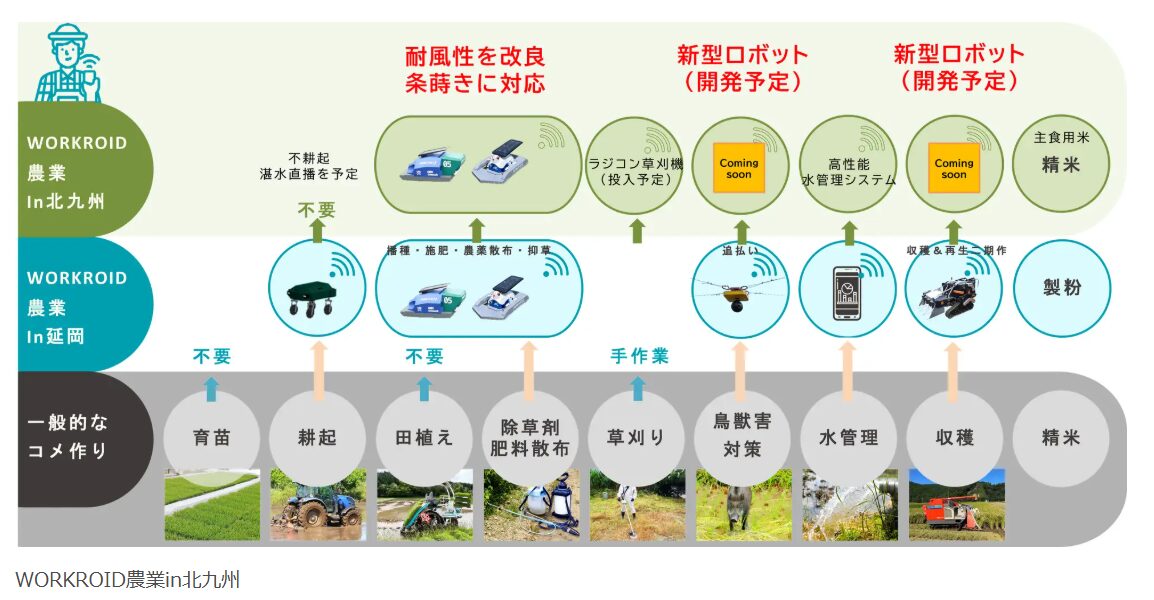
テムザックは、DEN農、ineRoboと共に、福岡県北九州市小倉南区にて、ロボット稲作(WORKROID農業)を実行する。
中山間地の稲作維持に役立つロボット開発と、作業受委託サービスや生産物を高付加価値化する出口スキームの構築などを行い、生産・流通および市民参加・地域連携の実現を目指す。
第一弾では群れ型の播種ロボットを予定しており、水面を航行しながら条蒔きを行う。ドローンのようにばら蒔きでなく、田植えのように一直線に播種ができる。特別な資格や安全管理体制も必要ない。
このまち全体が実証実験フィールド 『KRP未来実験場』
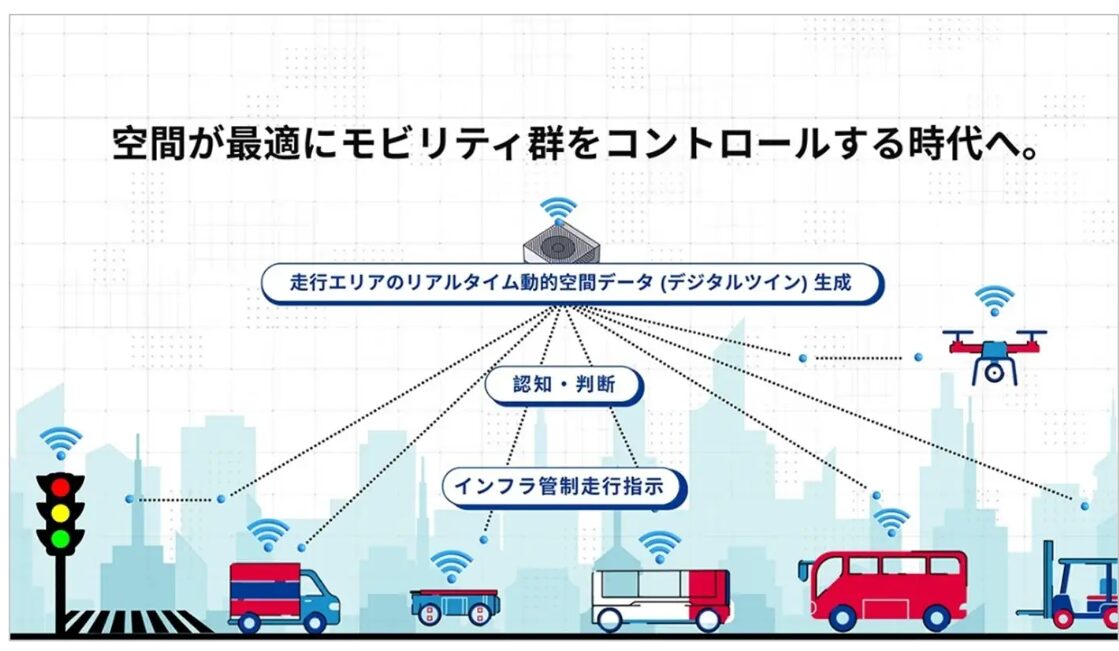
京都リサーチパーク地区(KRP地区)では、「このまち全体が実証実験フィールド 『KRP未来実験場』」と位置づけ、企業・団体向けに実証実験の場を提供している。2026年春からKRP地区の駐車場にて、スズキによって、「モビリティ連携基盤」を用いたインフラ管制自動走行システムの実証実験が本格始動する。
本実証実験は、駐車場内に設置したLiDARで取得した空間情報と動的情報をもとにリアルタイムなデジタルツインを生成し、そのデータを用いてモビリティを制御することで、モビリティ側にセンシングや自律制御を持たずに自動走行を実現する、“インフラ管制型自動走行”の実現性を検証。
高精度でリアルタイムなデジタルツイン技術により、自動走行するモビリティ側にはセンサや自律制御機能は持たせず、必要な認知・判断機能はすべてデジタルツイン情報で制御し、自動走行が実現できるため、モビリティ側に各種機器を搭載する必要がなくなり、車両のコスト削減・軽量化・死角のないより安全な走行を実現することができる。さらに、インフラ側で運行を制御するため、複数のモビリティを同一インフラで一元管理でき、相互の干渉を回避しながら協調走行が可能になる。
自律走行搬送ロボットAMR「Starシリーズ」のエレベーター連携

ロボットバンクの自律走行搬送ロボットAMR「Starシリーズ」が、エレベーターシステムとの連携機能の開発に成功した。
本機能を搭載したAMRは、人間の操作を一切介さず、自らの判断でエレベーターの制御システムと通信し、一連の動作を完全自動で行うことで、多層階施設における中断のないシームレスな自動搬送フローを構築する。フロアをまたぐ搬送作業の待ち時間や手間をゼロにし、物流・生産効率を劇的に向上させる。
これまで原則として単一フロアでの運用に限られていたAMRの稼働エリアは物理的な制約から解放され、多層階の工場や倉庫、オフィスビル、ホテル、病院など、より広範な環境での完全自動搬送が可能になる。
また、10万m²規模の敷地をカバーできる高精度マッピング技術と組み合わせることで、搬送領域が“水平方向”から“垂直方向”にも拡がり、「Starシリーズ」は広大かつ多層階の施設全体を、まるで一つの巨大な空間のように縦横無尽に走行できるようになる。